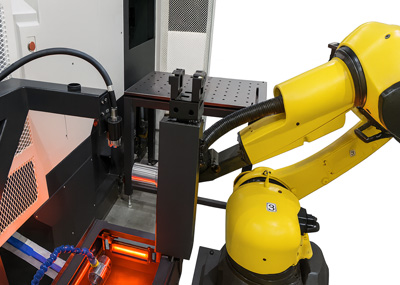
u 關節式機器人
特點
l
結構:多關節設計(通常六軸或以上),高靈活性,運動範圍廣,可執行複雜路徑。
l
速度與負載:適合高速度與高負載作業。
l
安全性:運作時力量大、速度快,需要設置安全護欄或隔離區域。
應用
l
重工業生產線,如汽車製造、金屬焊接、噴塗與重型物料搬運。
l
適合長時間、高效率自動化操作。
u 協作式機器人
特點
l
結構:小體積、多關節設計(通常六軸或七軸),結構緊湊,適合在工作人員周圍靈活作業。
l
速度與負載:適合低負載、輕量作業。
l
安全性:內建碰撞感測器與力矩限制,可設定虛擬邊界,人機接觸時即時停機。
應用
l
輕工業與電子製造,如電子裝配、包裝、上下料等作業。
l
適合與人協同作業,彈性生產與多樣化任務。